-

-

- 0755-8695 6431
聯系我們




SAVISION三維物體識別、定位及機器人引導視覺系統
2021年12月17日
SAVISION三維物體識別、定位及機器人引導視覺系統
對于工業機器人來說,重復作業并非難事,而是面對一個無序的環境,這意味著它不能再依靠設定好的程序繼續執行工作,而是需要對環境進行感知、分析,繼而做出判斷。超準視覺自主研發出的一套結合2D和3D結構光的多模態復合視覺技術,通過粗定位和精定位的方式,獲取物件的空間坐標數據,通過數據分析識別出工件的空間姿態,并引導機器人進行無序抓取和軌跡規劃,實現真正意義上的智能化,無人化。
系統構成
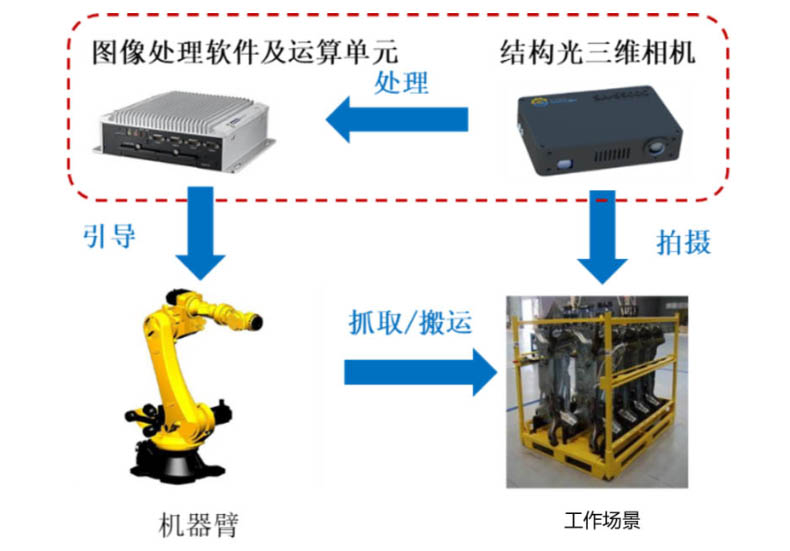
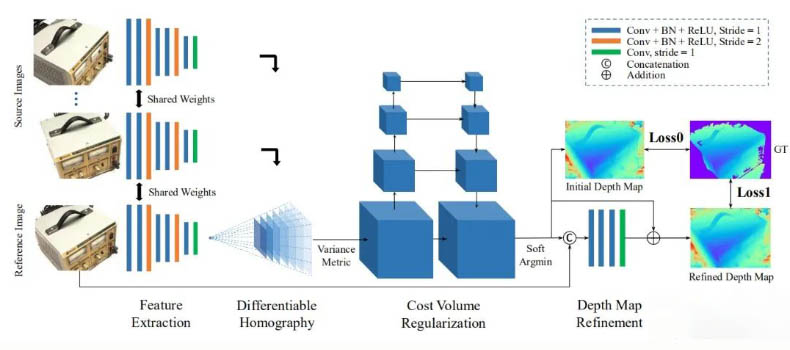
三維物體識別、定位及機器人引導視覺系統主要由高精度三維圖像傳感器和智能三維圖像處理及機器人引導軟件組成。通過3D結構光掃描,快速獲取工作場景的三維圖像信息,并通過與圖像庫中的模型進行對比,自動識別工作場景中的零件類型,及其三維空間內的位置及姿態信息,從而實時引導機器人調整位置及姿態,準確完成相應工作。
系統優點
精確性
±0.2mm的水平及垂直精度,以及±0.2°的旋轉及傾斜精度
多維度
6維度參數(X,Y,Z,α,β,γ)準確反映工件位置及姿態
通用性
根據場景需求選擇不同模式(隨臂式或固定式)及相機配置數量
快速性
從圖像采集到輸出結果時間小于1秒
便捷性
全圖形界面操作,無需機器人操作經驗,可輕松完成全部作業流程
兼容性
全面兼容KUKA,FANUC,ABB,安川,川崎,EPSON,傲博,越疆,卡諾普,智哥等國內外主流焊接機器人品牌
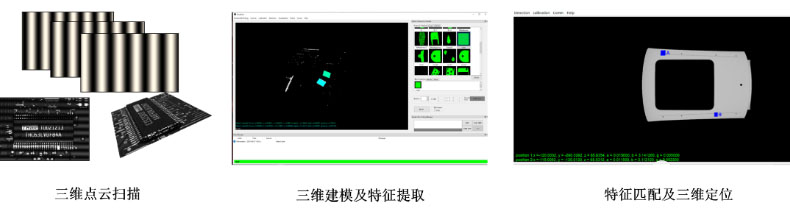
主要功能
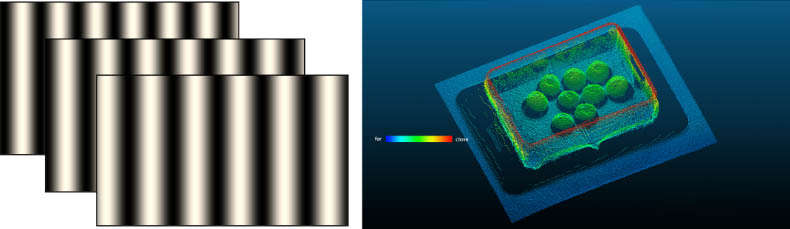
1.快速點云生成
基于編碼結構光技術高速三維圖像采集技術,同時具有良好的抗干擾性
2.快速三維建模
根據圖像或數模圖紙建立物體的三維模型
3.三維特征提取
在三維模型中選取特征區域并生成特征數據
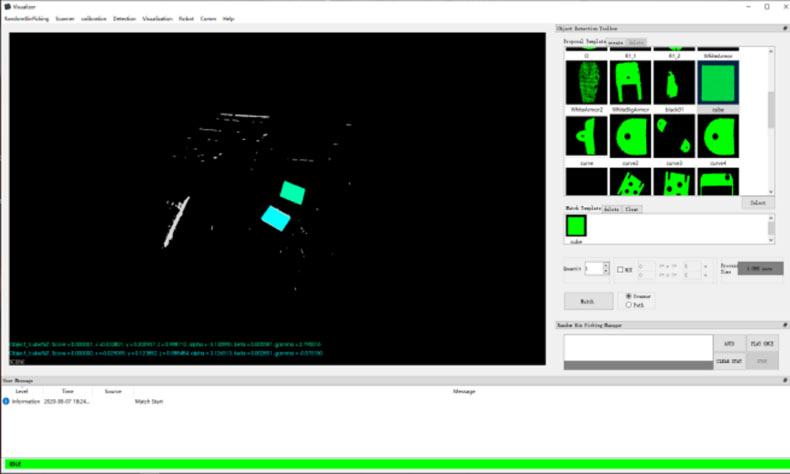
4.三維特征匹配
物體的特征數據與數據庫中的三維特征數據進行比對,找到符合度最高的三維特征
5.三維空間定位
根據物體特征的三維空間位置計算物體的三維位姿及機器人抓取位姿
應用案例
一、汽車白車身零件無序上料 2D相機&3D相機&機器人
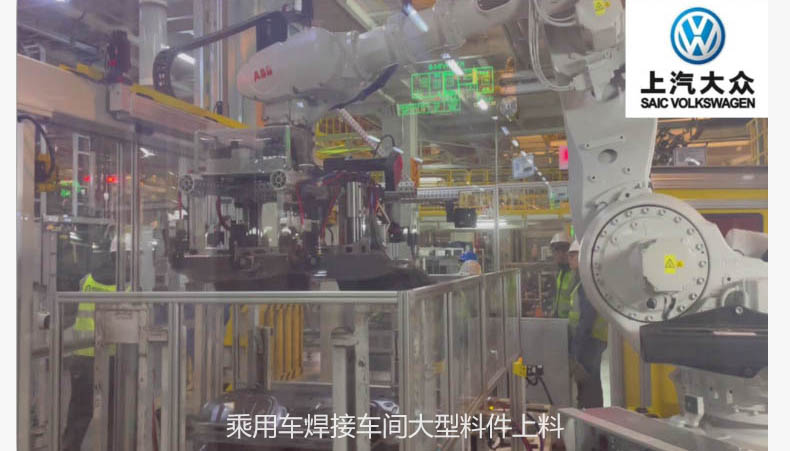
1、機器人取代人工實現上料;
2、2D+3D復合視覺引導,精度高達0.3mm;
3、可適應普通粗精度料架;
4、料車料架無需精確定位;
5、視覺防呆,確保來料正確;
6、單次識別抓取小于30秒
二、機器人工具末端校準系統 3D相機&機器人
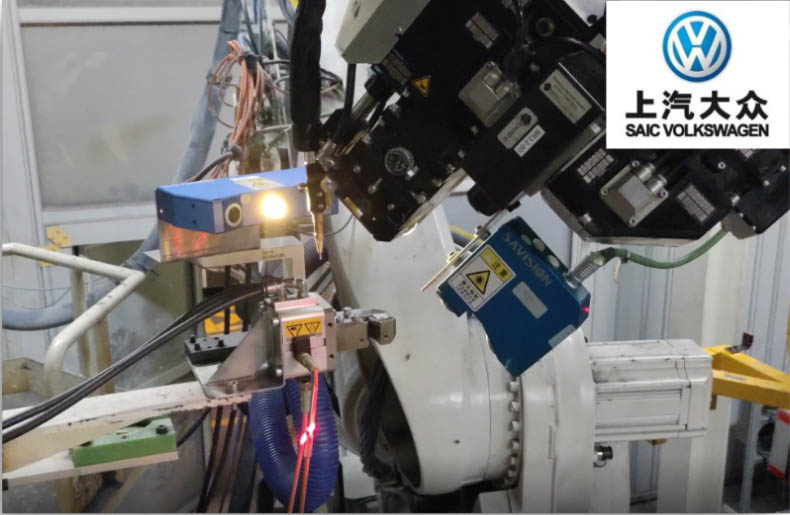
1、取代原導電嘴標定模式(30分鐘),快速實現工具端標定(不到1秒);
2、精度高,視覺精度可達0.02mm;
3、全自動,免示教;
4、體積小,易安裝;
三、萬代玩具零件無序抓取 3D相機&機器人
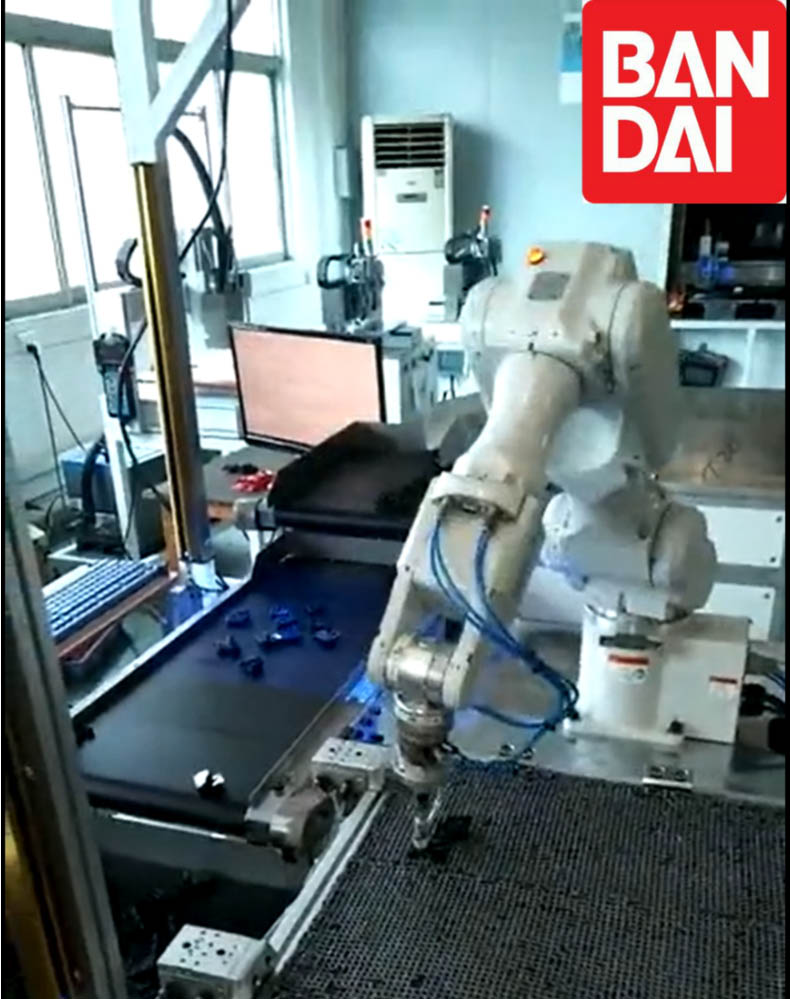
1、零件無序擺放,實現無序抓取;
2、快速識別,單次抓取并貼雙面膠≤5秒每條;
3、零件形狀復雜,可實現規定面有序擺放;
4、該系統可適應多種玩具零件;
5、漢化版軟件,簡單易操作。

